

執筆者: 瀕死
最終更新: 2024/07/10
はじめに
瀕死(ひんし)と申します。はじめに書くことが思いつきませんでした。 いつもより長編の本稿でもよろしくお願いいたします。
目的
RP2040開発ボードにおいてProgrammable I/Oを使う方法について解説する。
命令だけでなく指令やC言語側の機能においても解説する。
目次
- RP2040開発ボードでProgrammable I/Oを使う
- はじめに
- 目的
- 目次
- Programmable I/Oの構成
- PIO Assembler
- Directives
- .define
- .program
- .side_set
- .wrap_target
- .wrap
- .word
- 値
- 式
- コメント
- ラベル
- 命令
- 疑似命令
- 命令セット
- JMP
- 条件
- 例
- WAIT
- 例
- IN
- 入力元
- 例
- OUT
- 出力先
- 例
- PUSH
- 例
- PULL
- 例
- MOV
- 出力先
- 演算
- 入力元
- 例
- IRQ
- rel
- SET
- 出力先
- 例
- JMP
- C/C++による制御
- 初期化
- pins登録系
- FIFO系
- ステートマシンとのやり取り
- 初期化
- 実践
- 事前準備
- Lチカ
- おわりに
- 参考文献
Programmable I/Oの構成
PIOとは多用途のハードウェアインターフェイスで、CPUとは別のステートマシンで高速かつ正確なタイミングにI/Oを処理できる機能である。
以下にPIOと周辺の模式図を示す。
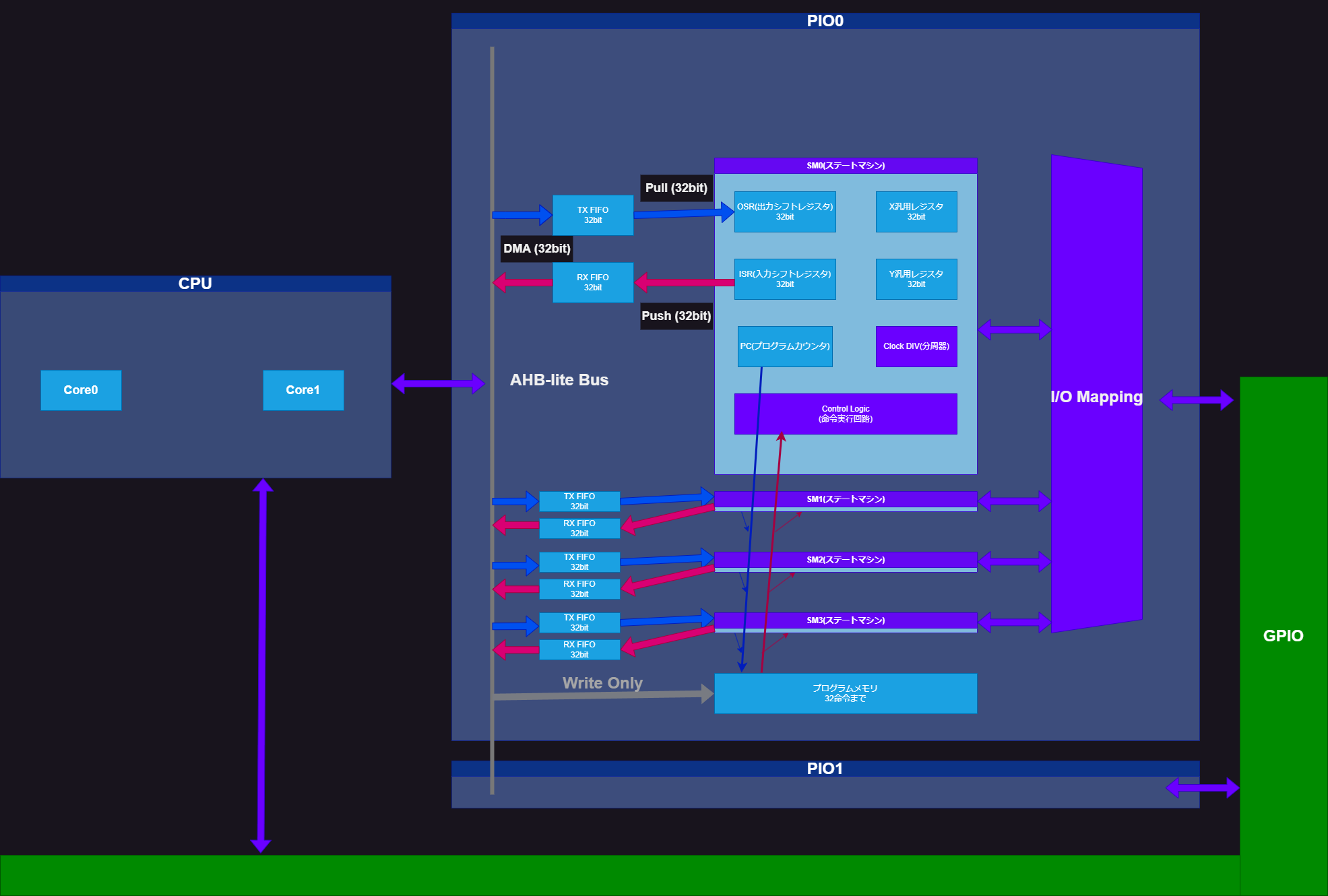
以下にステートマシンの模式図を示す。
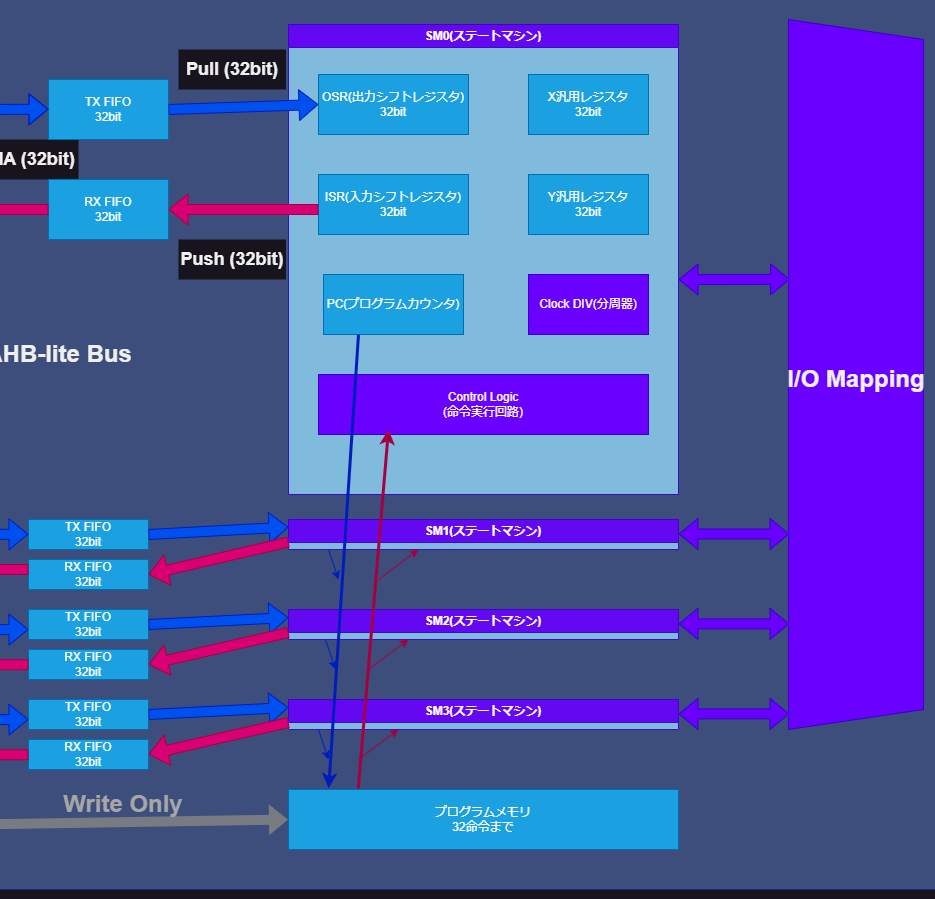
レジスタの細かい仕様はデータシートを見てほしい。
PIOは0~7番の割り込みフラグをそれぞれ持っている。 IRQ0~IRQ3はシステムレベルの割り込みである。
PIO Assembler
PIOのプログラムにはPIOアセンブリを用いて記述する。 PIOアセンブラはPIOプログラムを解析しバイナリコードを出力する。
Directives
.から始まる指令でアセンブリを制御できる。
指令は8種類あるが、本稿では.lang_optと.originを除いた6種類を紹介する。
以下、丸かっこは省略可能なパラメータである。
.define
.define (PUBLIC) <symbol> <value><symbol>を<value>で定義する。- 最初の
.programより前に記載されるとそのファイル中でグローバルとなる。 - それ以外ではその
.programのローカル定義となる。 PUBLICが指定されている場合、ヘッダファイルに追加されるため他のファイルで利用できる。
例を以下に示す。
.define LED_PIN 25.program
program <name><name>という名前で新しいプログラムを記述する。- C言語側から呼び出すのにも
<name>を使う。 <name>はCの変数命名規則に従う必要がある。- 次の
.programまでが<name>プログラムになる。 - PIO命令はプログラム内でのみ使用できる。
例を以下に示す。
.define LED_PIN 25
.program led_blink
.define OUT_BIT 1
out pins OUT_BIT
.program hoge
nop.side_set
.side_set <count> (opt) (pindirs)- ほかの命令による入出力とは並行して出力できるサイドセットピンの本数を指定する。
optで命令毎にサイドセットピンの出力を設定する必要がなくすことができる。- 最初のPIO命令より先に配置する。
pindirsでpinのHIGHとLOWの代わりに役割を入力(HI-Z)へ切り変えられるようにする。- 遅延と合わせて5bitまで
例を以下に示す。
.program hoge
.side_set 1
nop side 1 ; サイドセットピンをHIGHに
nop side 0 ; サイドセットピンをLOWに.wrap_target
.wrap_target.wrapと.wrap_targetとの間がループする。- JMP命令と違い無遅延で実行される。
- プログラム外で無効。
- プログラムごとに1つまで配置できる。
- 配置しなかった場合、プログラムの先頭に配置される。
.wrap
.wrap- 配置しなかった場合、プログラムの最後に配置される。
- それ以外は
.wrap_targetの使い方に準ずる。
例を以下に示す。
.program wrap_test
nop ; do something
.wrap_target
nop ; do something in loop
.wrap.word
.word <value>- 16bitのリテラルをPIO命令として保存する。
例を以下に示す。
.program hoge
.word 0x0000 ; jmp 0 と同意値
値には以下の種類がある。
分類 | 表記例 |
|---|---|
符号付10進数 | 2, -9 |
16進数 | 0xf |
2進数 | 0b0110 |
シンボル | LED_PIN (.defineによる定義) |
ラベル | :loop (実は内部で.defineされる) |
(式) | (2+1) (丸かっこで囲む) |
式
以下のものは式となる。
- 式 + 式
- 式 - 式
- 式 * 式
- 式 / 式 (整数)
- -式 (否定)
- ::式 (ビット反転)
- 値
コメント
;や//から行末までがコメントとなる。 C言語スタイルのブロックコメント/* */も使用できる。
ラベル
<symbol>:によってラベルを作成できる。
例を以下に示す。
.program hoge
loop:
; do something
jmp loop命令
<instruction> (side <side_set_value>) ([<delay_value>])- 16bit固定長の命令で、9種類の命令:
<instruction>が存在する。 .side_set <count>の<count>のbit数だけ<side_set_value>を指定する。optがない場合は、すべての命令で(side <side_set_value>)が必要。<delay_value>サイクルだけ、命令実行後に遅延が設定される。[<delay_value>]と<side_set_value>合わせて5bitで収まる必要がある。
疑似命令
nopnopはmov y yとしてアセンブルされる。 副作用がないので遅延やサイドセットに便利である。
命令セット
PIO命令は以下のとおりである。
命令 | 機能 |
|---|---|
jmp | pcの値を特定のアドレスに設定する |
wait | 設定した状態に変化するまで待機する |
in | ISRをシフトし、値をISRの空いた領域に書く |
out | OSRをシフトし、あふれた値を出力先に書く |
push | ISRからFIFOに32bitデータを書き込み、ISRとISRのシフトカウンタをクリアする |
pull | FIFOからOSRに32bitデータを読み込み、OSRのシフトカウンタをクリアする |
mov | PIOのSM内でデータをコピーする。 |
irq | 割り込みフラグのセットorクリアする |
set | 5bitの値を設定する |
JMP
jmp (<cond>) <target>- プログラムカウンタを指定されたアドレスに設定する
- 遅延は条件が偽でも実行される
<target>にはラベルか最初の命令を1としたオフセット値が使える
条件
使える条件は以下のとおりである。
記述 | 真になる条件 |
|---|---|
(書かない) | 常に |
!x | xが0のとき |
x-- | xが0でないとき、条件の真偽に関係なくデクリメントする |
!y | !xと同様 |
y-- | x--と同様 |
X!=Y | xとyの値が異なるとき |
PIN | JMP_PIN レジスタで指定されたピンがHIGHのとき |
!OSRE | OSRが空でないとき |
PIO命令は注意すべき点や、レジスタの値によって挙動が変わることがあるので、 詰まったらデータシートを見るべきである。
例
.program hoge
.wrap_target
pull
set x 7
send_bit:
out pins 1
jmp x-- send_bit; xが0でないならsend_bitに
.wrapWAIT
wait <polarity> gpio <gpio_num>
wait <polarity> pin <pin_num>
wait <polarity> irq <irq_num> ( rel )- 条件が満たされるまで待機する
<polarity>は0か1- gpioやpinが
<polarity>になることが条件 - irqにおいて
<polarity>が1の場合は、irqをクリアする - pinはIN_BASEで指定したGPIOを基準に指定する
例
wait 1 gpio 5 ; gpio5がHIGHになるまで待機IN
in <source>, <bit_count>- ISRを
<bit_count>だけシフトし、空いた領域に<source>の値を書き込む - シフト方向を
sm_config_set_in_shift()関数で設定できる - ISRシフトカウンタの値を
<bit_count>だけ増加させる - 自動pushが有効ならばISRシフトカウンタの値に応じてpushも同サイクルで実行される
- 自動pushのときにRX FIFOがいっぱいならば待機する
<bit_count>に32を指定する場合、0と記述する
入力元
- pins
- x
- y
- null (0が読み取られる)
- ISR
- OSR
例
in pins 1 ; ISRにピンの状態を書き込むOUT
out <destination>, <bit_count>- OSRを
<bit_count>だけシフトし、そのbitを<destination>に書き込む - シフト方向を
sm_config_set_out_shift()関数で設定できる - OSRシフトカウンタの値を
<bit_count>だけ増加させる - 自動pullが有効ならばOSRシフトカウンタの値に応じてpullも同サイクルで実行される
- 自動pullのときにTX FIFOがいっぱいならば待機する
<bit_count>に32を指定する場合、0と記述する
出力先
- pins
- x
- y
- null (消去される)
- pindirs (入力(HI-Z)と出力を切り替えられる)
- pc
- ISR
- exec (命令として実行される)
例
out pins 1 ; OSRの値に応じてピンの状態を変化させるPUSH
push (iffull)
push (iffull) block ; 上と全く同じ
push (iffull) noblock- ISRをRX FIFOに32bit書き込む
- 書き込み後にISRはゼロクリアされる
iffullならばISRシフトカウンタの値が指定値に達している場合のみpushされるnonblockならばRX FIFOがいっぱいでも待機しない- その場合FIFOには何も書き込まないが、ISRはゼロクリアされる
- さらにFDEBUG_RXSTALL フラグが設定される
例
pushPULL
pull (ifempty)
pull (ifempty) block ; 上と全く同じ
pull (ifempty) noblock- OSRにTX FIFOから32bit書き込む
iffullならばOSRシフトカウンタの値が指定値に達している場合のみpullされるnonblockならばTX FIFOが空でも待機しない- その場合OSRにはxレジスタの値が書き込まれる
例
pullMOV
mov <destination>, (op) <source><source>から<destination>にopした値をコピーする- 自動pullを使う場合はOSRに書き込むと干渉の恐れがある
出力先
- pins
- x
- y
- exec (遅延なしで命令として実行される)
- pc
- ISR
- OSR
演算
- ~, ! 論理否定
- :: ビット逆転
入力元
- pins
- x
- y
- null (0が読み取られる)
- STATUS (EXECCTRL_STATUS_SELで設定されたフラグの状態)
- ISR
- OSR
例
mov x nullIRQ
irq <irq_num> (rel)
irq set <irq_num> (rel) ; 上と同じ
irq nowait <irq_num> (rel); 上と同じ
irq wait <irq_num> (rel)
irq clear <irq_num> (rel)- 割り込みフラグを設定、クリアする
waitの場合は、フラグをセットして、クリアされるまで待機する
rel
relを付けると割り込みフラグ番号が以下のように計算される
(<irq_num> & 4) + ((SM番号 + <irq_num>) & 3)SET
set <destination>, <value><destination>を<value>に設定する<value>は5bit
出力先
- pins
- x
- y
- pindirs
例
set x,1C/C++による制御
.pioファイルのPIOプログラムの下に以下を追記し、初期化処理等を記述できる。
% c-sdk {
// c言語で記述できる
}初期化
多くの場合、以下のような初期化を行う関数を記述する。
% c-sdk {
#define CLKDIV 50000
void pio_led_blink_init(PIO pio, uint sm, uint offset) {
// {.programで指定したプログラム名}_program_get_default_config(offset);
// である必要がある
pio_sm_config c = led_blink_program_get_default_config(offset);
// ----------------------------------------------GPIO関係
// .define LED 25していることに注意
pio_gpio_init(pio, LED);
// ピンが入力か出力か設定
pio_sm_set_consecutive_pindirs(pio, sm, LED, 1, true);
// out命令で用いられるピンの指定
sm_config_set_out_pins(&c, LED, 1);
// ----------------------------------------------FIFO関係
// TX FIFO (CPUから見て出力なので)に接続
sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
// 32bit outするごとに自動でpullする
sm_config_set_out_shift(&c, true, true, 32);
// ----------------------------------------------その他
// ステートマシンの1サイクルを125MHzを分周して作る
sm_config_set_clkdiv_int_frac(&c, CLKDIV, 0x00);
// ステートマシンを初期化し設定する
pio_sm_init(pio, sm, offset, &c);
}
}上記以外で初期化においてよく使われる関数をいくつか紹介する。
pins登録系
sm_config_set_in_pins(&c, PIN); // set base OUT pin
sm_config_set_set_pins(&c, PIN, count); // set base SET pin
sm_config_set_sideset_pins(&c, PIN); // set base SIDESET pin各種命令のpinsで用いるピンを設定する。
FIFO系
sm_config_set_in_shift(&c, true, true, 32);第二引数から、shift_right、autopush、bit数
ステートマシンとのやり取り
実践
事前準備
CmakeLists.txrを以下のように編集する。 以下では実行可能ファイル名はa、pioファイル名はtest.pioとしている。
target_link_librariesにhardware_pioを追記するpico_generate_pio_header(a ${CMAKE_SOURCE_DIR}/test.pio)を追加する
main.cppにインクルードファイルを追加する。
#include "hardware/pio.h"
#include "test.pio.h"
Lチカ
main.cppは以下のとおりとする。
#include "pico/stdlib.h"
#include "hardware/gpio.h"
#include "hardware/pio.h"
#include "test.pio.h"
// pio0とpio1がある
PIO pio = pio0;
uint offsetLedBlink;
uint smLedBlink;
int main() {
stdio_init_all();
// ${作製したプログラムの名前}_programの参照を渡す
offsetLedBlink = pio_add_program(pio, &led_blink_program);
smLedBlink = pio_claim_unused_sm(pio, true);
pio_led_blink_init(pio, smLedBlink, offsetLedBlink);
pio_sm_set_enabled(pio, smLedBlink, true);
while(true) {
// smのTX FIFOに32bit渡す
// 0xAは0b1010である
pio_sm_put_blocking(pio, smLedBlink, 0xAAAAAAAA);
}
}
test.pioは以下のとおりとする。」
.define PUBLIC CLKDIV 50000
.define PUBLIC LED 25
.program led_blink
.wrap_target
out pins, 1 [31] ; OSRから1bit読み取ってピンの電圧に反映。
nop [31] ; 待機
.wrap
% c-sdk {
void pio_led_blink_init(PIO pio, uint sm, uint offset) {
// {.programで指定したプログラム名}_program_get_default_config(offset);
// である必要がある
pio_sm_config c = led_blink_program_get_default_config(offset);
// ----------------------------------------------GPIO関係
// .define LED 25していることに注意
pio_gpio_init(pio, LED);
// ピンが入力か出力か設定
pio_sm_set_consecutive_pindirs(pio, sm, LED, 1, true);
// out命令で用いられるピンの指定
sm_config_set_out_pins(&c, LED, 1);
// ----------------------------------------------FIFO関係
// TX FIFO (CPUから見て出力なので)に接続
sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
// 32bit outするごとに自動でpullする
sm_config_set_out_shift(&c, true, true, 32);
// ----------------------------------------------その他
// ステートマシンの1サイクルを125MHzを分周して作る
sm_config_set_clkdiv_int_frac(&c, CLKDIV, 0x00);
// ステートマシンを初期化し設定する
pio_sm_init(pio, sm, offset, &c);
}
%}
ビルドして実行すると高速で内蔵LEDが点滅する。
おわりに
次回はPS2の接続仕様について解説する予定です。
PIOについての解説も続けていく予定ですのでこれからもよろしくお願いします。
参考文献
- RP2040 Datasheet
- Raspberry Pi Ltd
- https://datasheets.raspberrypi.com/rp2040/rp2040-datasheet.pdf
- 2024/07/10 アクセス
- pico-sdk
- Raspberry Pi
- https://github.com/raspberrypi/pico-sdk/blob/master/src/rp2_common/hardware_pio/include/hardware/pio.h
- 2024/07/10 アクセス
- RP2040 PIO 覚え書き
- N->N->N
- https://hanya-orz.hatenablog.com/entry/2021/07/28/191910
- 2024/07/10 アクセス
- ラズピコ PIO ~解説編~
- moon's ラズピコづくし
- https://moons.link/pico/post-498/
- 2024/07/10 アクセス

2024年度 入部
この人が書いた記事







